一、背景
最近做一个项目,需要用STM32F407来做7路串口通信,由于芯片最多只有6路,所以只能用IO口来模拟串口通信。在网上查找了很多模拟串口的资料,决定串口发送采用延时的方式,串口接收采用外部中断+定时器中断来实现。外部中断检测第一次检测下降沿表明接收到了起始位,通过定时器中断定时检测接收IO口上的电平,从而判断接收的是0还是1.
二、正文
1)、串口发送:
由于串口发送的函数比较简单,所以先从发送开始做起,首先咱们来熟悉一下串口协议,1位起始位+8位数据位+1位奇偶校验位+1位停止位(其中停止位可能为0.5位,1位,1.5位或2位,可以选择)。串口异步传输在空闲状态时都必须是高电平。

由于现在是模拟串口,暂时不考虑复杂的奇偶校验位,所以采用的格式为:1位起始位+8位数据位+1位奇偶校验位+1位停止位。项目需要采用的波特率为115200,所以每发送1bit数据需要的时间:1/115200=8.68us.
模拟串口发送发送函数:
1 #define COM1_TX_PORT GPIOA 2 3 #define COM1_TX_PIN GPIO_Pin_9 4 5 void Virtual_Uart_Bytesend(u8 val) 6 7 { 8 9 u8 i=0;10 11 COM1_TX_DATA_LOW(); // 起始位,低电平,IO口初始化时应该置为高电平12 13 delay_us(baudRate);14 15 for(i = 0;i<8;i++) // 8位数据位16 17 {18 19 if (val & 0x01)20 21 {22 23 COM1_TX_DATA_HIGH();24 25 }26 27 else28 29 {30 31 COM1_TX_DATA_LOW();32 33 }34 35 delay_us(baudRate);36 37 val >>= 1;38 39 }40 41 COM1_TX_DATA_HIGH(); // 停止位 高电平42 43 delay_us(baudRate);44 45 } 以上代码完全是根据协议的格式来写的,思路很简单,里面最重要的一个参数是这个baundRate;这个参数根据不同的波特率而不同,并且实际值和理论值算出来的时间可能有些差别,调试发现STM32F4的误差比较小,基本上理论值和实际值一样就可以正常通信。波特率为115200,延时理论上为8.68us。但是问题就来了,STM32F407例程delay.c里给的延时函数最小单位为us,设置baundRate=8或者9通信偶尔能够正常接收,但是很多时候是乱码,如下图:
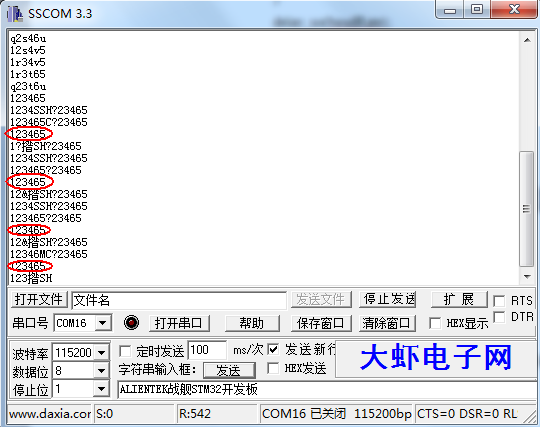
如何解决这一问题呢,首先想到是设计一个延时0.1us或者更小的延时函数来实现,需要了解SRM32F4的时钟部分,这部分暂时没有去研究
第二种方法:采用nop来延时+滴答定时器定时8s
也就是用定时器定时8s,然后在加上nop指令延时,然后实际调试用一个for循环增加4个nop指令左右就能正常接收。具体延时函数实现如下:
1 // 模拟串口延时函数 波特率为115200 所以延时8.68us 2 3 void Vuart_delay_us(void) 4 5 { 6 7 u16 i = 0; 8 9 u32 temp; 10 11 SysTick->LOAD=8*fac_us; //时间加载 12 13 SysTick->VAL=0x00; //清空计数器14 15 SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //开始倒数 16 17 do18 19 {20 21 temp=SysTick->CTRL;22 23 }while((temp&0x01)&&!(temp&(1<<16))); //等待时间到达 24 25 SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //关闭计数器26 27 SysTick->VAL =0X00; //清空计数器 28 29 for (i = 0;i<4;i++)30 31 {32 33 __NOP;34 35 }36 37 } 实验现象如下图所示:

主函数中调用串口发送函数。
1 // 发送一个字符串 2 3 void Virtual_Uart1_StringSend(u8 *str) 4 5 { 6 7 while(*str != 0) 8 9 {10 11 Virtual_Uart1_Bytesend(*str);12 13 str++;14 15 }16 17 } 2)、串口接收
串口接收比较复杂,暂未研究。
以上的串口接收对实现1模拟串口还可以,但是项目需要用的2个或者更多的模拟串口就不适合了,需要更改一下思路,开辟一个新的定时器,定时器的优先级需要开到最高,定时1/(波特率*3倍)s,这里波特率设置为115200,所以定时时间为2.89us,波特率越高对定时器的要求就越高,幸好STM32F407非常强大,这么高的串口波特率需要定时至少2us左右才能实现模拟串口的正常通信。基本思路分为接收和发送。
接收时:定时器定时去扫描IO口的状态,当3次里面检测到有至少2次低电平时,则判断该电平为低电平。首先是设计定时器定时0.289us,参考原子的官方定时器中断例程,定时函数如下:
TIM3_Int_Init(5000-1,8400-1); // 定时器时钟84M,分频系数8400,所以84M/8400=10Khz的计数频率,计数5000次为500ms
更改为
TIM3_Int_Init(242,1-1); //定时器时钟84M,分频系数1,所以84M/1=84Mhz的计数频率,计数242次为2.89us
不分频时,如果计数1次则定时的时间为1/84MHz=0.0119us,所以将计数值更改为242,则定时时间=1/84MHz * 242 = 2.88us
定时器初始化函数在主函数初始化时候调用,值得注意的是定时器的优先级应该设置为最高,即修改定时初始化函数如下:
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0x00; // 抢占优先级0 优先级设置为最高
NVIC_InitStructure.NVIC_IRQChannelSubPriority=0x00; // 子优先级0 优先级设置为最高
设计好定时器之后,接下来是设计一个8位数据接收函数,主要思路是通过一个状态机、定时计数变量(计数三次表示8.6us)、高电平计数变量和低电平计数变量(分别用于三次采样里面有几次是能踩到高电平或者低电平)。
变量定义如下:
static u32 recvStat = COM_STOP_BIT; // 定义状态机
static u8 recvData = 0; // 定义一个接收数据变量
static u32 timer_cnt = 0; // 定时总次数
static u32 high_cnt = 0; // 高电平检测次数
static u32 low_cnt = 0; // 低电平检测次数
状态机定义在头文件中:
enum{
COM_START_BIT, //起始位
COM_D0_BIT, //bit0
COM_D1_BIT, //bit1
COM_D2_BIT, //bit2
COM_D3_BIT, //bit3
COM_D4_BIT, //bit4
COM_D5_BIT, //bit5
COM_D6_BIT, //bit6
COM_D7_BIT, //bit7
COM_STOP_BIT, //bit8
};
//定义接收引脚
#define COM1_RX_DATA GPIO_ReadInputDataBit(COM1_RX_PORT,COM1_RX_PIN) // 接收引脚
具体函数实现如下:
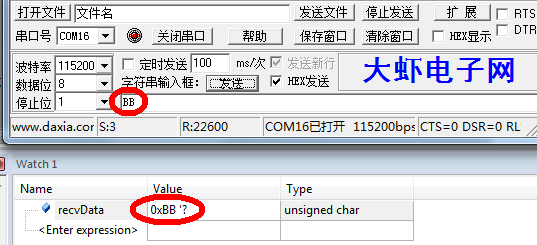
1 // 接收一个8位数据 2 3 void Virtual_Uart1_Byterecived(void) 4 5 { 6 7 timer_cnt++; 8 9 if((COM1_RX_DATA == 0)&&(recvStat == COM_STOP_BIT)) // 起始信号 10 11 { low_cnt++; 12 13 if (timer_cnt >= 3) 14 15 { 16 17 timer_cnt=0; 18 19 if (low_cnt>1) 20 21 { 22 23 recvStat = COM_START_BIT; 24 25 } 26 27 low_cnt=0; 28 29 } 30 31 return; 32 33 } 34 35 if(timer_cnt >= 3) 36 37 { if(recvStat < COM_STOP_BIT) 38 39 recvStat++; 40 41 } 42 43 if((recvStat == COM_STOP_BIT)&&(COM1_RX_DATA == 1)) // 空闲时,计数值清0 44 45 { 46 47 timer_cnt = 0; 48 49 high_cnt=0; 50 51 low_cnt=0; 52 53 return; 54 55 } 56 57 if(COM1_RX_DATA == 0) 58 59 { 60 61 low_cnt++; 62 63 high_cnt=0; 64 65 if (timer_cnt >= 3) 66 67 { 68 69 timer_cnt=0; 70 71 if (low_cnt>1) // 3次采样里面是否有两次有效 72 73 { 74 75 recvData &= ~(1 <<(recvStat - 1)); 76 77 } 78 79 low_cnt=0; 80 81 } 82 83 } 84 85 else 86 87 { 88 89 high_cnt++; 90 91 low_cnt=0; 92 93 if (timer_cnt >= 3) 94 95 { 96 97 timer_cnt=0; 98 99 if (high_cnt>1) // 3次采样里面是否有两次有效100 101 {102 103 recvData |= (1 <<(recvStat - 1));104 105 }106 107 high_cnt=0;108 109 }110 111 }112 113 } 实验现象如下:
发送:发送思路比接收更简单,只要按照串口的协议来发送即可。首先是发送起始位,3个定时器周期后发送八位数据位,最后发送停止位。源代码如下:
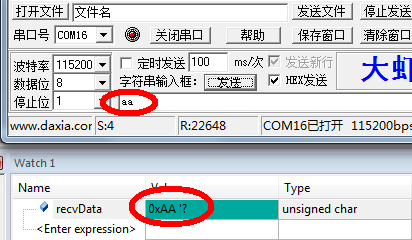
1 // 串口发送函数 2 3 void Virtual_Uart1_Bytesend(void) 4 5 { 6 7 if (txdEnable == 0) 8 9 { 10 11 Tx_timer_cnt = 0; 12 13 return; 14 15 } 16 17 Tx_timer_cnt++; 18 19 if ((txdStat == COM_STOP_BIT)&&(txdEnable == 1)) 20 21 { 22 23 COM1_TX_DATA_LOW(); 24 25 if (Tx_timer_cnt >= 3) 26 27 { 28 29 Tx_timer_cnt=0; 30 31 txdStat = COM_START_BIT; 32 33 txdData = Tx_Buf[Txd_Bytes]; 34 35 } 36 37 } 38 39 else if(txdStat == COM_D7_BIT) 40 41 { 42 43 COM1_TX_DATA_HIGH(); 44 45 if (Tx_timer_cnt >= 3) 46 47 { 48 49 Tx_timer_cnt=0; 50 51 txdStat = COM_STOP_BIT; 52 53 Txd_Bytes++; 54 55 if(Txd_Bytes>3) // 测试发送三个字节 56 57 { 58 59 Txd_Bytes = 0; 60 61 txdEnable = 0; 62 63 } 64 65 } 66 67 } 68 69 else 70 71 { 72 73 if (txdData & 0x01) 74 75 { 76 77 COM1_TX_DATA_HIGH(); 78 79 } 80 81 else 82 83 { 84 85 COM1_TX_DATA_LOW(); 86 87 } 88 89 if (Tx_timer_cnt >= 3) 90 91 { 92 93 Tx_timer_cnt=0; 94 95 txdData >>= 1; 96 97 txdStat++; 98 99 }100 101 }102 103 } 实验现象,串口每隔1s发送四个字节的数据1234,如下图所示

以上基本实现了模拟串口数据的发送和接收,可能有很多地方可以优化,后续会更新。
记录时间:2017年7月19日13:49:12
记录地点:XH